Занимательная робототехника. Футбол роботов
Всероссийская робототехническая олимпиада
Это правила заключительного этапа Всероссийской Робототехнической Олимпиады 2017. Правила регионального этапа ВРО размещены в разделе РЕГИОНАЛЬНЫЕ ЭТАПЫ. Правила международного этапа WRO размещены в разделе WRO.
Полезные ссылки для заключительного этапа Олимпиады:
Общие правила Олимпиады [обсудить на форуме]Общие правила категории "Футбол роботов" [обсудить на форуме]Техническое задание на изготовление полигона [обсудить на форуме]
[обсудить на форуме]
Описание задания
Футбол роботов стремится воссоздать игру в футбол людей. Команды двое на двое, состоящие из автономных роботов, гонятся за мячом, излучающим инфракрасный свет; их цель – забить противнику как можно больше голов.

Следующие пункты правил будут соблюдаться неукоснительно:
1. Роботы должны быть построены и запрограммированы исключительно участниками команд.
2. Как и в футболе людей, решение судьи является окончательным. Счет матча остается неизменным при любых обстоятельствах, за исключением тех случаев, когда в счете допущены ошибки. См. Раздел 7.
3. Участники и тренеры команд, судьи должны придерживаться такого поведения, которое соответствует целям Олимпиады и не затрудняет проведение мероприятия.
4. Ценно не то, что вы выиграете или проиграете, а то, как много вы узнаете.
1. Команды роботов
1.1. В составе команды должно быть два робота: либо вратарь и нападающий, либо два нападающих.
1.2. Замены роботов строго запрещены. Команда участников, заменившая роботов, будет отстранена от участия в состязании.
2. Счет
2.1. Гол будет засчитан, если мяч ударяется о заднюю стенку ворот, т.е. когда мяч полностью пересек линию ворот.
2.2. Команда, которая забила наибольшее количество голов, побеждает в матче.
2.3. Ничья засчитывается только в матчах группового этапа.
2.4. Штрафной гол присуждается только в том случае, если судья уверен в том, что мяч явно катился в ворота и ударился об обороняющегося робота, который некоторой частью находился за линией внутреннего пространства ворот.
2.5. Автоголы засчитываются как голы в пользу противника.
3. Длительность матча
3.1. Матчи состоят из двух таймов по 5 минут.
3.2. Командам дается максимально 5 минут между таймами для отладки конструкции и программы роботов.
3.3. Таймер будет производить непрерывный отсчет времени без каких-либо пауз в течение матча.
3.4. Судья может объявить перерыв, для того чтобы пояснить пункт правил или разрешить починить робота, который был поврежден в результате перетаскивания или столкновения. Смотрите раздел «Разъяснение правил».
3.5. Ответственность за присутствие перед началом матча лежит на командах. Команде будет начисляться штрафной гол за каждую минуту отсутствия, вплоть до 5 минут.
3.6. При наличии времени финальные игры будут проводиться с таймами по 10 минут.
4. Проведение матча
4.1. Перед началом матча судья будет бросать монетку. Команда, выигравшая жребий, может выбрать, в начале первого или второго тайма делать первый удар.
4.2. Робот команды, которая делает первый удар, должен сделать удар по мячу, находящемся в центре поля.
4.3. Все остальные роботы должны касаться штрафной площадки, которую они защищают.
4.4. Команда, делающая первый удар, размещает своих роботов первой. Изменение положения роботов после их первоначального размещения запрещено. Команда, не разыгрывающая мяч, размещает своих роботов второй.
4.5. Матч начинается по команде судьи. Все роботы должны быть немедленно запущены. Колеса у роботов могут вращаться до команды судьи, но роботы должны удерживаться в стационарном положении над полем.
4.6. Роботы, которые стартовали или были отпущены до команды судей, будут удалены с поля на одну минуту.
4.7. Роботы, которые отсутствуют на поле или стартовали с задержкой, объявляются "поврежденными" и удаляются с поля на одну минуту.
4.8. Если забит гол, то команда, пропустившая гол, делает первый удар для продолжения игры.
4.9. Если два робота-противника сцепились друг с другом, то судья может разделить их минимальным движением.
4.10. Судья немедленно объявляет «Давление», как только робот начинает передавливать мяч, зажатый между ним и роботом противоположной команды, который также должен держать мяч своей передней частью. После этого судья размещает мяч в центре поля, и матч продолжается без остановки. Если после того, как судья объявил «Давление», был забит гол, как прямой результат «проталкивания» мяча роботом, то гол не будет засчитан.
4.11. Участники команд не могут прикасаться к роботам без разрешения судей. Если участник команды, без разрешения судьи, дотронулся до своего робота, то робот будет объявлен поврежденным и удален на минуту. Если участник команды, без разрешения судьи, дотронулся до робота противоположной команды, то участник будет дисквалифицирован до конца тайма. Если в результате движения робота должен был быть забит гол, но участник дотронулся до робота, и гол не состоялся, то гол все равно будет засчитан.
4.12. Если мяч ударяется о борт за воротами, игра не будет остановлена, и мяч непосредственно возвращается в центральную точку поля. Если это место занято роботом, то мяч будет помещен как можно ближе, но не прямо перед роботом.
4.13. Если оба робота обороняющейся команды находятся в своей штрафной площадке, и их действия расцениваются как существенно влияющими на игру, судья объявляет «Двойная оборона» и перемещает в центр поля робота, оказывающего наименьшее влияние на игру. В случае участия вратаря в такой ситуации перемещается нападающий команды.
5. Рестарт
5.1. «Рестарт» объявляется в том случае, если мяч заблокирован между несколькими роботами в течение разумного периода времени и не имеет никаких шансов освободиться, или, если никакой робот не может приблизиться к мячу за разумный период времени. В качестве «разумного периода времени» принимается период времени длительностью до 15 секунд.
5.2. Любые застрявшие роботы должны быть немедленно перемещены в свою штрафную площадку. Часть робота должна находиться внутри штрафной площадки.
5.3. Роботов можно не выключать и держать за ручку.
5.4. Судья запустит мяч с места в центре длинного борта поля по направлению к центру поля.
5.5. Роботов можно отпустить, как только мяч покинет руку судьи.
5.6. Любой робот, который не может стартовать немедленно, будет объявлен «поврежденным».
5.7. Любой робот, который отпущен прежде, чем мяч был выпущен, будет удален с поля на одну минуту.
6. Поврежденные роботы
6.1. Робот будет объявляться судьей поврежденным, если он имеет серьезные поломки, движется неправильно (например, раздел «Вратарь») или не реагирует на мяч.
6.2. Участники могут убирать роботов с поля, если судья дает разрешение после запроса капитана команды. Такой робот будет расцениваться как поврежденный.
6.3. Поврежденный робот должен оставаться вне поля в течение одной минуты или до забитого гола.
6.4. Поврежденный робот должен быть отремонтирован, прежде чем он будет возвращен на поле. Если робот не восстановлен за отведенное время, то робот повторно объявляется поврежденным и должен отсутствовать одну минуту.
6.5. Поврежденный робот может быть возвращен на поле только после разрешения судьи. Робот должен быть помещен в штрафную площадку своей команды, и в таком положении, которое не дает роботу явное преимущество, т.е. не в направлении мяча. Судья не разрешит вернуть робота на поле, если тот перекрывает путь мячу, катящемуся в ворота.
6.6. Если робот переворачивается по своей собственной вине или в результате столкновения с роботом своей команды, то он будет считаться поврежденным.
6.7. Если робот переворачивается в результате столкновения с роботом противника, он не будет расцениваться как поврежденный и может быть поставлен судьей, и матч должен продолжаться.
7. Разъяснение правил
7.1. Во время матча решение судьи является окончательным.
7.2. Если участники требуют разъяснения правил, то они должны сделать это немедленно, попросив «Технического перерыва». Таймер матча будет остановлен.
7.3. Если капитан команды не удовлетворен объяснением судьи данного поля, то он может просить обратиться к судье, ответственному за состязание.
7.4. Тренеры не должны быть вовлечены в любое обсуждение правил, иначе команда этого тренера может быть дисквалифицирована.
7.5. Видеозаписи не принимаются к рассмотрению.
7.6. После того, как судья, ответственный за состязание, и судья данного поля пришли к единому решению, дальнейшие обсуждения не принимаются.
7.7. Любое дальнейшее возражение приведет к вручению желтой карточки, и, далее, красной карточки, если капитан команды или тренер продолжит возражать.
7.8. Красная карточка приведет к тому, что этот человек обязан покинуть зону состязания до конца состязания.
7.9. Судье, ответственному за состязание, может потребоваться внести изменения в правила в виду местных условий или обстоятельств проведения состязания. Участники будут уведомлены об этом при первой же возможности.
8. Требования к роботу
8.1. Конструирование и программирование роботов должны осуществляться исключительно участниками команды.
8.2. Ультразвуковой датчик должен быть размещен в задней части робота и обращен вправо. Это значит, если робот направлен параллельно длинному борту поля в сторону ворот противника, то датчик должен быть обращен вправо.
8.3. Роботы будут измеряться в вертикальном положении, при этом они не должны ни на что опираться и их подвижные части должны быть максимально выдвинуты.
8.4. Робот в вертикальном положении должен помещаться в вертикально расположенный цилиндр диаметром 22 см.
8.5. Высота робот должна составлять менее 22 см.
8.6. Вес роботов должен составлять не более 1 кг.
8.7. Если у робота есть часть, которая может выдвигаться в нескольких направлениях, то он должен быть проверен во время работы этой части. При этом робот не должен касаться измерительного цилиндра. Например, если у робота есть механизм удара по мячу, то размер робота должен проверяться в крайних положениях этого механизма.
8.8. В конструкции роботов необходимо предусмотреть ручку, за которую судьи смогут их легко взять. На данную ручку не распространяются ограничения по высоте и весу робота. Ручки могут быть сделаны из любых деталей, не обязательно LEGO.
8.9. Участники состязания должны оформить своего робота (обозначить метками, украсить) так, чтобы была видна принадлежность роботов к одной команде. Это не должно влиять на игровой процесс. Оформление робота также не подпадает под ограничение по высоте.
8.10. Раскраска роботов или излучаемый ими свет не должны мешать работе датчиков других роботов.
8.11. Участники несут ответственность за то, чтобы робот соответствовал требованиям правил в течение всего периода состязания. Если после матча выяснится, что робот не соответствовал правилам, то очки, начисленные команде в матчах с участием такого робота, будут аннулированы.
8.12. Роботы должны быть спроектированы с учетом возможных неровностей поверхности высотой до 5 мм и наклона.
8.13. Команды должны проектировать и программировать своих роботов, принимая во внимание изменения в освещении, интенсивности мяча и магнитных условиях, так как они могут отличаться друг от друга в различных местах проведения, и меняться с течением временем.
9. Управление роботом
9.1. Роботы должны работать автономно.
9.2. В роботах должен быть предусмотрен ручной запуск.
9.3. Дистанционное управление роботом оператором в любом виде (например, с использованием пульта) не допускается.
9.4. Роботы должны быть способны двигаться в любом направлении.
9.5. Коммуникация между роботами по каналу Bluetooth является приемлемой до тех пор, пока это не мешает работе других роботов.
9.6. Должна быть предусмотрена возможность отключения коммуникации между роботами по требованию судьи.
10. Ведение мяча
10.1. Зона захвата мяча – это любое внутреннее пространство, ограниченное вертикальной поверхностью, которая прикладывается к выступающим частям робота. Высота поверхности соответствует высоте мяча.
10.2. Мяч не может проходить в зону захвата мяча более чем на 2 см.
10.3. Робот не может «удерживать» мяч. Удерживать мяч значит полностью завладеть мячом, исключив любую свободу его движений. Примерами являются фиксация мяча в конструкции робота, укрытие мяча роботом или его блокирование любой частью робота. Если мяч перестает вращаться во время движения робота, или мяч не отскакивает при попадании в робота, то это хороший показатель, что мяч блокирован.
10.4. Не разрешается удерживать мяч под роботом, другими словами ни одна из частей робота не может нависать над мячом более чем на половину диаметра мяча.
11. Вратарь
11.1. Если команда использует вратаря, то он не может быть ограничен в движениях и перемещаться только в одном направлении на поле. Он должен быть запрограммирован на движение во всех направлениях.
11.2. Вратарь должен реагировать на мяч, двигаясь вперед, для того, чтобы перехватить мяч до того, как он попадет в ворота. При необходимости, робот-вратарь может выходить некоторой частью за пределы штрафной площадки (45 см от ворот).
11.3. Не допускается реакция на мяч в виде движения вбок, а затем вперед.
11.4. Если робот-вратарь не реагирует на сигналы мяча движением вперед, то этот робот считается «поврежденным» (Раздел 6).
12. Аутентификация работ участников команд
12.1. Участники команды должны будут объяснить принцип работы своих роботов в ходе опроса, чтобы убедиться в том, что сборку и программирование роботов они осуществили самостоятельно.
12.2. Участники команды должны будут ответить на вопросы касаемо их участия в подготовке.
12.3. Участниками команды должно быть продемонстрировано полное понимание принципа работы программы робота.
12.4. Время проведения опроса будет объявлено до начала состязания.
12.5. Если экспертная комиссия установила, что тренер оказал существенную помощь, или работу над роботами преимущественно произвели не участники команды, то команда будет дисквалифицирована.
13. Ничья в Финальном туре
13.1. Если в матче Финального тура, проводимого по схеме плей-офф («на выбывание»), окажется равный счет на момент ожидаемого конца матча, то матч не останавливается, и игра продолжается до первого гола.
13.2. Если гол не забит по истечении 3 минут дополнительного времени, то будут удалены вратари, в случае двух нападающих, команда может выбрать робота, который будет удален.
13.3. Если гол не забит по истечении еще 3 минут, то будет награждена команда с наиболее высоким рейтингом по итогам квалификационного тура.
 14. Мяч
14. Мяч
14.1. В игре должен использоваться сбалансированный электронный мяч диаметром 7,4 см.
14.2. В состязании будет использоваться инфракрасный электронный мяч фирмы Hitechnic (IRB 1005) в режиме импульсного излучения - MODE D (pulsed).
Уточнения правил
Здесь будут поясняться некоторые пункты правил
Нет, ультразвуковой датчик должен быть обращен вправо и располагаться под углом 90 градусов. Например, когда робот движется параллельно длинному борту, то его ультразвуковой датчик должен быть направлен перпендикулярно длинному борту.
robolymp.ru
Международные состязания роботов — Правила — Футбол роботов
Футбол роботов
Содержание
- Игровое поле
- Мяч
- Роботы
- Проведение матча
- Разрешение конфликтных ситуаций
- Проверки
- Кодекс поведения
Замечание: Командам рекомендуется предусмотреть в конструкции робота возможность преодолевать незначительные препятствия высотой до 5 мм как на игровом поле, так и на его границах.
1. Игровое поле
-
Поле
- Игровое поле для соревнований имеет размеры 1220 х 1830 мм. По периметру поля нанесена граница - белая полоса шириной 300 мм.
- Поверхность поля имеет износостойкое виниловое или пластиковое покрытие.
- Центральная часть игрового поля должна быть абсолютно ровной и строго горизонтальной. Все белые границы, в том числе и на концах поля, приподняты в наружные стороны на 10 мм.
- Игровое поле должно быть размещено на ковре или войлочной подстилке.
- Игровое поле можно развернуть как на столе, так и на полу.
-
Ограждающие стенки.
- Вокруг игрового поля, в том числе и за воротами, установлены матовые чёрные ограждающие стенки.
- Высота стенок составляет 80 мм. (70мм WRO2013)
- Ограждающие стенки могут быть изготовлены из любого материала, поскольку это никак не влияет на игру.

-
Ворота.
- Ширина каждых ворот составляет 450 мм.
- Задняя и боковые стенки ворот изнутри окрашены в небесно голубой цвет. Пол внутри ворот - белый. Снаружи ворота имеют матовый чёрный цвет.
- Глубина каждых ворот составляет 80 мм. (74мм WRO2013)
- Каждые ворота снабжены чёрной перекладиной, установленной на высоте 140 мм над уровнем поля.
- Поверхность поля внутри ворот должна быть абсолютно ровной и строго горизонтальной.
-
Нейтральные зоны.
- На игровом поле предусмотрены две нейтральные зоны.
- Первая нейтральная зона образована границей тёмно-зелёной и зелёной зоны, а вторая нейтральная зона образована границей тёмно-зелёной и светло-зелёной зоной (на поле нейтральные зоны не изображены).
-
Освещение и магнитные поля
- Команды должны быть готовы откалибровать своих роботов в соответствии с условиями освещённости и магнитных полей в месте проведения состязаний. Организаторы олимпиады должны приложить максимум усилий к тому, чтобы поддерживать на футбольных полях минимально допустимый уровень освещённости и расположить их как можно дальше от источников магнитных полей, например, от электропроводки и металлических предметов. Что, тем не менее, не всегда возможно обеспечить.
Замечание: Командам рекомендуется предусмотреть в конструкции роботе возможность успешно действовать в условиях изменяющейся освещённости и магнитных полей, поскольку в различных местах проведения соревнований они могут разниться.
2. Мяч.
-
Технические условия.
- Для игры будет предложен хорошо сбалансированный электронный мяч диаметром 8 см.
- Мяч будет испускать импульсное (MODE D (1200Hz pulsed)) инфракрасное (ИК) излучение.
- Поставщики мячей.? Официальными поставщиками мячей для Футбола роботов будует компания HiTechnic - Infrared Electronic Ball (IRB1005). Подробную информацию об этих мячах можно найти на сайте: www.HiTechnic.com.

3. Роботы.
-
Размеры роботов.
- Размеры роботов будут определять в «положении стоя» с учётом всех максимально выступающих частей.
- Расположенный таким образом робот должен вписываться в цилиндр с внутренним диаметром 220 мм.
- В высоту робот должен быть не более 220 мм.?
- Каждый робот должен весить не более 1 кг.
- При проверке каждый из роботов должен быть установлен в положение с максимальной высотой и размахом выступающих частей. Если робот снабжён подвижными элементами, которые выступают в двух направлениях, то этот робот должен будет быть проверен в действии. При этом робот не должен касаться стенок проверочного цилиндра.
-
Управление роботом.
- Роботы должны быть способны действовать автономно.
- Должна быть предусмотрена возможность запуска робота вручную.
- Запрещается использование любых систем дистанционного управления роботами.
- Роботы должны быть способны двигаться во всех направлениях.
- Допускается использование соединения bluetooth для связи роботов между собой?, но только если это не окажет воздействия на работоспособность остальных роботов.
Замечание: Роботы должны иметь возможность отключения своих устройств связи по требованию судей?.
-
Маркировка/Расцветки роботов.
- Участники соревнований должны каким-либо способом пометить своих роботов так, чтобы была видна их принадлежность к одной и той же команде.
- Роботы должны быть окрашены и помечены так, чтобы это не оказывало влияния на игру и датчики других роботов.
-
Команды
- Во всех командах должно быть не более двух (2) роботов. Во время соревнований запрещаются любые замены роботов. Иначе команда будет дисквалифицирована.
-
Конструкция роботов.
- Роботы должны быть построены только из фирменных элементов, моторов и датчиков LEGO.
- Запрещается использовать любые иные материалы, включая клей, липкую ленту, винты и т.д. Исключением является только использование стяжек или липкой ленты для скрепления проводов.
- Все используемые электрические элементы должны быть из конструкторов типа LEGO MINDSTORMS. В одном матче можно использовать ограниченное количество электрических элементов:
|
Для пользователей RCX: |
Для пользователей NXT: |
|
Блок RCX (1) |
Блок RCX (1) |
|
Моторы (3) |
Моторы (3) |
|
Датчики касания (2) |
Датчики касания (2) |
|
Датчики освещенности (2) |
Датчики освещенности (2) |
|
Лампы (1) |
Лампы (1) |
|
Датчики оборотов (3) |
Датчики оборотов (3 минус количество имеющихся моторов NXT) |
|
Тритий датчик касания ИЛИ освещенности (1) |
Датчик расстояния (1) |
|
Датчик-компас RCX (1) |
Датчик-компас NXT (1) |
|
Датчик RCX flyeye R0326(1) |
ИК датчик NXT (IR seeker sensor) (1) |
-
Зоны захвата мяча и зоны перемещений
- Зоны захвата мяча – это любое внутренне пространство игрового поля в пределах, охватываемых поверочной линейкой, приложенной к выступающим частям робота.
- Мяч не может проникать в Зону захвата более, чем на 3 см.
- Робот не имеет права "удерживать" мяч.
- Роботу запрещается удерживать мяч под собой.
- Мяч всегда должен быть «на виду» так, чтобы другие игроки имели к нему доступ в любой момент матча, части робота не должны перекрывать мяч более чем на радиус.
- Единственным исключением из правила 3.6.3 является применение вращающегося барабана для придания мячу динамического обратного вращения, чтобы удержать его. Такое действие называется "дриблингом" (Ведением мяча).
- Робот, «ведущий» мяч, должен выполнять требования правила 3.6.2. От точки контакта этого робота до центра мяча должно быть 3 см.
Замечание: «Удерживать мяч» - означает полный контроль над ним путём блокирования всех степеней свободы мяча. Например, если робот прижмёт мяч к своему корпусу или охватит его любыми своими элементами, затрудняя доступ к мячу остальным «игрокам». Будет считаться, что робот «удерживает» мяч, если тот перестаёт вращаться, когда робот «ведёт» его или если мяч не рикошетит, когда попадает в робота.
-
Вратари (Голкиперы)
- Если команда использует вратаря, то ему недостаточно перемещаться только в одном направлении, и он должен быть запрограммирован так, чтобы иметь возможность двигаться по полю в любую сторону.
- Вратарь должен выдвигаться вперёд, чтобы попытаться перехватить мяч перед воротами. А при необходимости робот должен иметь возможность перемещаться вне штрафной площадки (на расстояние до 45 см от ворот).
- Если робот-вратарь движется не по прямой, он будет признан «Повреждённым» (см. Раздел 4.7).
Замечание: Вратарь не может смещаться в стороны, допускается только движение вперёд.
4. Проведение матча.
-
Предварительные настройки.
- Организаторы турнира разрешат доступ к игровому полю для настройки и проверки роботов до начала соревнований в соответствии с расписанием, которое будет опубликовано в начале мероприятия.
- Организаторы постараются выделить не менее 10 минут для проведения настроек перед каждой игрой.
- Судья будет проверять исправность мяча перед каждым периодом (половиной игры) матча.
- В этот же период команды могут предъявить претензии к роботам соперника.
-
Продолжительность игры.
- Матч будет состоять из двух 10-минутных периодов. По решению оргкомитета турнира продолжительность периодов в некоторых случаях может быть сокращена до 5 минут.
- Между периодами предусмотрен 5-минутный перерыв.
- Секундомер будет включен на протяжении всей игры (двух 10-минутных периодов), без остановки времени (за исключением тайм-аутов, взятых судьёй – см.Раздел 4.9.4).
- По решению судьи команда может быть наказана одним голом за одну минуту опоздания.
- Если команда не будет готова к игре через 5 минут после её начала, она будет признана проигравшей со счетом 0:5.
- Если разница забитых голов в матче достигает 10, то матч завершается.
-
Начало игры.
- Перед началом каждого периода матча судья будет подбрасывать монетку, и команда, стоящая первой в списке, должна будет сделать свой выбор (орел или решка) и заявить его, пока монета находится в воздухе.
- Команда, выигравшая жребий, может выбрать: (a) ворота или (b) право первого удара.
- Команде, которой не повезло жребием, достанется другой выбор.
- Команда, которой не досталось право первого удара по мячу в первом периоде матча, произведёт его во втором периоде.
-
Первые удары по мячу.
- Каждый период матча начинается с первого удара по мячу.
- Все роботы должны находиться на своей половине поля (в обороне).
- Роботы не должны двигаться (колёса не должны вращаться).
- Судья устанавливает мяч в центр игрового поля.
- Команда, которой предоставлено право первого удара, устанавливает своих роботов на поле первой. При этом роботы не должны двигаться.
- Все роботы, кроме того, который будет наносить первый удар по мячу, должны частично находиться в штрафной площадке.
- По сигналу судьи все роботы должны быть немедленно запущены членом команды (человеком).
- Любой робот, начавший игру до сигнала судьи, будет удалён с поля на одну минуту.
-
Подсчёт очков.
- Гол будет засчитан, если мяч полностью пересечёт линию ворот. То есть, мяч должен удариться о заднюю стенку ворот. Если гол засчитан, судья свистит в свисток.
- Чтобы гол был засчитан, мяч должен свободно вкатиться в ворота. Иначе судья решит, что мяч был «затолкнут» и не засчитает его. В этом случае игра не будет остановлена. Гол не будет засчитан. Мяч будет установлен в любой ближайшей доступной нейтральной зоне и игра будет продолжена. Робот должен произвести видимое действие, чтобы ударить по мячу, иначе он будет считаться «затолканным». То есть, если робот не совершит действия, чтобы освободиться от мяча, который свободно катится вместе с роботом, движущимся по направлению к воротам, будет считаться, что робот «затолкал» мяч.*
- Если мяч попадёт в ворота, отскочив от робота-защитника, который какой-либо своей частью находится на линии ворот или в «площади ворот», он будет засчитан. Роботы должны быть сконструированы так, чтобы перекладина ворот препятствовала их попаданию за линию ворот.
- После засчитанного гола команда, пропустившая его, начинает игру с центра поля.
- "Автоголы" будут засчитаны, даже если мячи были «затолканы» в ворота.*
*Понятие "затолкнутого" мяча отсутствовует в правилах WRO 2013, но на МСР оно по прежнему будет.
-
Блокировка.
- Блокировка происходит в случаях, когда мяч надолго застрял между несколькими роботами (“затруднительная” ситуация) и в обозримом будущем ничто не может её изменить.
- В случае блокировки мяч устанавливают в ближайшей нейтральной зоне. При повторении такой ситуации мяч устанавливают в центр поля.
- При объявлении ситуации блокировки, все роботы будут раздвинуты судьёй или капитанами команд на минимальное расстояние друг от друга, достаточное, чтобы они смогли начать свободно двигаться.
-
Повреждённые роботы.
- Если робот оказался неспособным самостоятельно двигаться и/или не реагируют на мяч, судья объявляет их повреждёнными.
- Если один робот остаётся на белой боковой полосе или где-то застрял и не «собирается» возвращаться на игровое поле, судья признаёт его повреждённым.
- Судья или игроки (после разрешения судьи) могут убрать повреждённого робота (или роботов) с игрового поля.
- Повреждённый робот должен оставаться вне игрового поля не менее одной минуты. В укороченных (5-минутных) периодах повреждённый робот может быть заменён после забитого и засчитанного гола.
- Повреждённый робот должен быть починен и с разрешения судьи может быть возвращён в нейтральную зону ближайшую к воротам, которые он защищает, при этом не будет учитываться, например, был ли робот повёрнут к мячу.
- Вратарей можно возвращать на поле в любое место перед воротами (в чёрную зону пенальти).
- Если робот опрокинулся после столкновения с другим роботом, судья может снова поставить его «на ноги» и робот продолжит играть.
- Если робот опрокинулся «самостоятельно», его признают повреждённым и удалят с поля.
-
Мяч «в ауте»
- Мяч будет считаться в ауте, если он ударился о внешнюю ограждающую стенку или покинул поле.
- После объявления «мяч в ауте», его устанавливают в ближайшей нейтральной зоне, так, чтобы это было невыгодно команде, робот которой последним коснулся мяча. То есть, в нейтральной зоне, расположенной в направлении, противоположном удару.
-
Остановка игры.
- В ситуациях, описанных в разделах 4.6-4.8, игра может быть прервана, а мяч установлен в ближайшей нейтральной зоне, откуда игра и будет продолжена.
- Также игра приостанавливается по свистку судьи (тайм-аут), но при этом секундомер не останавливают – на усмотрение судьи. В этот момент все роботы должны сразу же остановиться и вернуться в те позиции, которые они занимали, когда прозвучал свисток.
- Остановленная игра возобновляется по сигналу судьи, при этом все роботы должны стартовать одновременно.
- Судья также может взять тайм-аут (“Referees Time Out”) для ремонта игрового поля, а также в ситуациях, описанных в пункте 4.11.3, или судью вызовут для уточнения правил проведения соревнований. Если остановка игры затягивается, судья может остановить секундомер.
-
Групповая оборона Multiple Defense .
- Групповой обороной считается ситуация, когда более одного робота обороняющейся команды входят в зону пенальти и оказывают решающее воздействие на игру.
- В случае "Групповой обороны" робота, вносящего наименьший вклад в игру, устанавливают в центр поля. В ситуациях с участием вратарей будут перемещены остальные игроки.
-
Нарушения правил.
- Если робот использует устройство, посредством которого (или без него) постоянно атакует роботов, не владеющих мячом, судья фиксирует нарушение правил ("Foul"). После этого капитан команды должен не позднее, чем через одну минуту снять этого робота с игрового поля и устранить возникшую проблему; после этого игра будет возобновлена (в соответствии с Разделом 4.7 "Повреждённые роботы").
- Если робот (роботы) продолжает «фолить», его постоянно будут удалять с поля, на него нацепят предупреждающую жёлтую карточку (стикер), а судья будет заносить эти нарушения в протокол матча.
- Если в результате нарушения правил робот будет повреждён, судья остановит игру и секундомер (на 2 минуты WRO2013)до тех пор, пока повреждение не будет устранено (см. Раздел 4.9.4 «Остановка игры»).
- Если робот был удалён за нарушения правил в двух матчах, он дисквалифицируется на весь турнир.
- Свободные удары. На данном турнире правилами не предусмотрены свободные удары.
- Пенальти. На данном турнире правилами не предусмотрены пенальти.
- Положение «вне игры» (офсайды). На данном турнире офсайды правилами не предусмотрены.
-
Участие в турнире людей.
- В целом, перемещение роботов людьми не разрешается.
- Люди могут перемещать роботов только по разрешению судьи.
- Перед началом каждого матча команды должны назначить одного из своих членов «капитаном». Капитану будет позволено снимать роботов с игрового поля и заменять их во время игры. Капитаны должны действовать строго по установленным правилам и в соответствии с указаниями судьи.
- Остальные члены команды во время игры (когда мяч находится в игре) не должны приближаться к игровому полю менее, чем на один метр, кроме случаев, определяемых судьёй.
5. Разрешение конфликтных ситуаций.
-
Судьи.
- Во время игры решения судьи являются окончательными. Любое несогласие с решением судьи наказывается предупреждением (жёлтой? карточкой?). Если после этого конфликт продолжается, судья показывает красную карточку, что немедленно приводит к поражению в игре.
- Если капитаны команд удовлетворены результатами игры, они подписывают соответствующие протоколы по счёту и судейству.
- Любые протесты после игры принимаются только если её результаты некорректны или вызывают сомнения. После подписания протокола матча, протесты не принимаются.
-
Уточнение правил.
- Уточнение правил может быть произведено только членами Футбольного комитета WRO.
- Если необходимо произвести уточнение правил, судья должен немедленно остановить игру, взять тайм-аут (см. Раздел 4.9.4), остановить секундомер и подтвердить решение , прежде, чем продолжить игру.
-
Исключительные обстоятельства.
- В исключительных ситуациях, наступающих при возникновении непредвиденных проблем и/или затруднений у роботов, в правила соревнований по соглашению противных сторон могут быть внесены (в ходе состязаний) особые поправки.
6. Проверки.
-
Наблюдатели.
- Все роботы будут проверены судейской комиссией в начале каждого дня соревнований, чтобы удостовериться, что роботы соответствуют всем требованиям, изложенным в Разделе 3.
- На командах лежит ответственность за предоставление своих роботов на повторную проверку, если те не прошли проверку судейской комиссией, или их конструкция была изменена во время соревнований.
- При любых нарушениях правил проверки робот не будет допущен к соревнованиям до тех пор, пока произведенные модификации влияют на действия робота.
- Все модификации должны быть произведены в оговоренное регламентом соревнований время. Команды не должны задерживать игру из-за внесения модификаций.
- Если робот не соответствует техническим требованиям (даже с произведенными изменениями), то данный? робот будет дисквалифицирован на текущую игру (но не на весь турнир).
-
Учащиеся.
- Учащихся попросят объяснить, как работает их робот с тем, чтобы удостовериться, что они самостоятельно сконструировали и запрограммировали своего робота.
- Учащимся будут заданы вопросы о том, как они проводили подготовительные работы. Это будет анкетирование и запись видео интервью, которые необходимы для исследовательских целей.
- Должны быть предоставлены документы (фотографии, журналы регистрации, постеры, планы и т.п.), подтверждающие то, что роботы сконструированы и запрограммированы самими учащимися. Подробное описание мелких изменений не требуется. Необходимо предоставить доказательства полного понимания показанной программы.
- Предполагается, что организаторы соревнований проведут эти проверочные собеседования до начала финальных игр.
- При любых нарушениях правил проверки робот не будет допущен к соревнованиям до тех пор, пока произведенные модификации влияют на действия робота.
- Все модификации должны быть произведены в оговоренное регламентом соревнований время. Команды не должны задерживать игру из-за внесения модификаций.
- Если робот не соответствует техническим требованиям (даже с произведенными изменениями), то данный робот будет дисквалифицирован на текущую игру (но не на весь турнир).
- Если выяснится, что учащимся была оказана чрезмерная помощь со стороны преподавателей при создании роботов, то такая команда будет дисквалифицирована на весь турнир.
7. Кодекс поведения.
-
Честная игра.
- Роботы, которые преднамеренно и неоднократно во время игры становятся причиной повреждений других роботов, будут дисквалифицированы (см. Раздел 4.11).
- Роботы, которые во время игры повреждают игровое поле или мяч, будут дисквалифицированы (см. Раздел 3.8).
- Люди, которые преднамеренно оказывают воздействие на любых роботов или повреждают игровое поле или мяч, будут дисквалифицированы.
- Предполагается, что целью всех команд является честная игра в «робототехнический футбол».
-
Поведение участников.
- Все участники турнира должны сдерживать свои эмоции в местах проведения соревнований.
- Участники не должны заходить на чужие площадки для настройки роботов, кроме как по прямому приглашению членами других команд.
- Участникам, которые ведут себя неподобающим образом, могут предложить покинуть помещение, где проводятся соревнования, и они рискуют быть дисквалифицированными на весь турнир.
- Эти меры могут быть применены по усмотрению судей, руководителей организаторов соревнований и представителями местных властей.
-
Руководители-наставники (менторы).
- Руководители-наставники (учителя, родители, сопровождающие лица и другие взрослые – члены команд) не имеют права заходить в рабочие зоны учащихся.
- Руководителям-наставникам будет предоставлено достаточно мест для сидения вокруг рабочих зон учащихся, чтобы они могли наблюдать за ними.
- Руководители-наставники не могут принимать участие в ремонте или программировании роботов учащихся. Роботы не должны покидать рабочие зоны учащихся в течение всего дня соревнований.
- Вмешательство руководителей-наставников в работу над роботом или в решение судей в первый раз будет наказано предупреждением (жёлтой карточкой). При повторении этих нарушений будет предъявлена красная карточка и нарушителю предложат покинуть помещение, где проводятся соревнования.
-
Публикации.
- Команды будут поощряться за размещение материалов по соревнованиям на YouTube с использованием тэгов WRO GEN II Soccer. За лучшие клипы могут быть присуждены призы по решению организаторов турнира.
-
Поддержание духа соревнований.
- Предполагается, что все участники соревнований, как учащиеся, так и наставники, будут уважать цели проведения олимпиады WRO.
- Судьи и официальные представители олимпийского комитета будут действовать соответственно духу проводимого мероприятия.
- Не важно, выиграли вы, или проиграли, значение имеет лишь то, чему вы научились.
Оригинальные правила WRO 2013
Обновлено 12.03.2013
wroboto.ru
Роботы и футбол: в Китае проходит RoboCup 2015



19 июля в Хэфэе (Китай) стартовал ежегодный чемпионат мира по футболу среди роботов RoboCup. На это популярное робототехническое соревнование съехалось более двух тысяч участников из 47 стран. О мероприятии и философии робофутбола читайте в нашей статье.
Что такое RoboCup?
RoboCup был основан в 1997 году (по другим сведениям в 1993) с весьма амбициозной целью — создать к 2050 году команду роботов-футболистов, которые смогут выиграть футбольный матч у победителя Чемпионат мира по футболу среди людей, соблюдая все правила FIFA.

Роботы NAO на футбольном поле
Название RoboCup — сокращение от Robot Soccer World Cup — Чемпионат по футболу среди роботов. RoboCup включает состязания по РобоФутболу в нескольких категориях в зависимости от размера и формы роботов:
- малые роботы (не более 18 см),
- средние роботы (до 50 см),
- стандартные платформы (все команды создают роботов на одной и той же платформе, например NAO),
- роботы-гуманоиды (произвольные платформы и дизайн).

Кроме того, проводится целая серия не связанных с футболом соревнований — танцы роботов, бытовые роботы, роботы-спасатели, промышленные роботы, компьютерный симуляции и другие.
RoboCup — популярное ежегодное робототехническое мероприятие. Турниры проводятся по всеми миру. В них участвует около 50 стран и 2500 команд. Соревнования ориентированы и на детей, и на студентов, и на профессиональные команды — возраст не ограничен.
За право проведения очередных соревнований проводятся конкурсы. В 2015 году RoboCup проходит в Китае. А организатор RoboCup 2016 — это немецкий Лейпциг, который смог выиграть право проведения конкурса у французского Лиона.
Футбол роботов
Футбол роботов — одно из самых популярных направлений робототехники. Почему именно футбол, а не другой вид спорта?
Все просто. Футбол — самая популярная игра с невероятным количеством спортсменов и зрителей по всему миру. Благодаря популярности традиционного футбола робофутбол заведомо получает большое количество поклонников и вызывает интерес у широких слоев населения.

 ' mycrib[2] = '
' mycrib[2] = ' ' var x = 0; function rotate(mycrib) { while (x
' var x = 0; function rotate(mycrib) { while (x Вместе с тем, создание команды роботов-футболистов, которые смогут автономно, т.е. без участия человека, играть в футбол — сложная и интересная робототехническая задача, которая требует и уникальных алгоритмов, и конструкторских решений. Разработка таких роботов имеет самостоятельную ценность для науки и техники, и конечно это емкое направление для образовательной робототехники.
Наиболее популярны среди простых зрителей футболисты-гуманоиды, однако в РобоФутболе могут встречаться и далекие от человеческого облика роботы:

Соревнования по футболу роботов проводятся в рамках очень многих мероприятий. Например, категория РобоФутбол представлена на WRO (читайте про WRO здесь, здесь и здесь) .
Несколько видео про футбол роботов RoboCup 2015:
Презентационный ролик RoboCup 2015:
И еще несколько видео:
Upd 16.08.2015:
Робофутбол из fischertechnik
Сразу 4 медали — золотую и 3 серебряных — на RoboCup 2015 получила команда их Хорватии. Их роботы сделаны из конструктора fischertechnik!

Хорватская команда Udruga-Robofreak и их роботы. Фото из фейсбука команды
И еще крупным планом:

Хорватская команда Udruga-Robofreak с роботом-футболистом. Фото из фейсбука команды
Читайте также

edurobots.ru
Всероссийская робототехническая олимпиада
Это окончательная версия правил всероссийского этапа Олимпиады. Также рекомендуется изучить Общие правила Олимпиады и Общие правила категории "Футбол роботов". Для изготовления поля состязания доступно Техническое задание.Уточнения выделены желтым фоном.
Описание задания
Футбол роботов стремится воссоздать игру в футбол людей. Команды двое на двое, состоящие из автономных роботов, гонятся за мячом, излучающим инфракрасный свет; их цель – забить противнику как можно больше голов.
Основные правила футбола
Следующие пункты правил будут соблюдаться неукоснительно:
1. Роботы должны быть построены и запрограммированы исключительно участниками команд.
2. Как и в футболе людей, решение судьи является окончательным. Счет матча остается неизменным при любых обстоятельствах, за исключением тех случаев, когда в счете допущены ошибки. См. Раздел 7.
3. Участники и тренеры команд должны придерживаться такого поведения, которое соответствует целям Олимпиады и не затрудняет проведение мероприятия.
4. Ценно не то, что вы выиграете или проиграете, а то, как много вы узнаете.
Правила и регламент проведения
Содержание
- Команды роботов
- Счет
- Длительность матча
- Проведение матча
- Рестарт
- Поврежденные роботы
- Разъяснение правил
- Характеристики робота
- Сборка робота
- Управление роботом
- Ведение мяча
- Вратарь
- Аутентификация работ участников команд
- Отбор в Финальный тур
- Ничья в Финальном туре
- Поле для футбола
- Мяч WRO
- Кодекс поведения
- Упрощения правил для регионального этапа
1. Команды роботов
1.1. Каждая команда готовит двух роботов: либо вратарь и нападающий, либо два нападающих.
1.2. Замены роботов строго запрещены. Команда участников, заменившая роботов, будет отстранена от участия в состязании.
2. Счет
2.1. Гол будет засчитан, если мяч ударяется о заднюю стенку ворот, т.е. когда мяч полностью пересек линию ворот.
2.2. Команда, которая забила наибольшее количество голов, побеждает в матче.
2.3. Ничья засчитывается только в матчах группового этапа.
2.4. Штрафной гол присуждается только в том случае, если судья уверен в том, что мяч явно катился в ворота и ударился об обороняющегося робота, который некоторой частью находился за линией внутреннего пространства ворот.
2.5. Автоголы засчитываются как голы в пользу противника.
3. Длительность матча
3.1. Матчи состоят из двух таймов по 5 минут.
3.2. Командам дается максимально 5 минут между таймами на исправление конструкции и программы роботов.
3.3. Таймер будет производить непрерывный отсчет времени без каких-либо пауз в течение матча.
3.4. Судья может объявить перерыв, для того чтобы пояснить пункт правил или разрешить починить робота, который был поврежден в результате перетаскивания или столкновения. Смотрите раздел «Разъяснение правил».
3.5. Ответственность за присутствие перед началом матча лежит на командах. Команде будет начисляться штрафной гол за каждую минуту отсутствия, вплоть до 5 минут.
3.6. При наличии времени финальные игры будут проводиться с таймами по 10 минут.
4. Проведение матча
4.1. В начале матча судья будет бросать монетку. Команда, выигравшая жребий, может выбрать, в начале первого или второго тайма делать первый удар.
4.2. Робот команды, которая делает первый удар, должен выбить мяч с черного кружка в центре поля.
4.3. Все остальные роботы должны касаться штрафной площадки, которую они защищают.
4.4. Команда, делающая первый удар, размещает своих роботов первой. Изменение положения роботов после их первоначального размещения запрещено. Команда, не разыгрывающая мяч, размещает своих роботов второй.
4.5. Матч начинается по команде судьи. Все роботы должны быть немедленно запущены.
4.6. Роботы, которые стартовали до команды судей, будут удалены с поля на одну минуту.
4.7. Роботы, которые отсутствуют на поле или промедлили со стартом, объявляются "поврежденными" и удаляются с поля на одну минуту.
4.8. Если забит гол, то команда, пропустившая гол, делает первый удар для продолжения игры.
4.9. Если два робота-противника сцепились друг с другом, то судья может разделить их минимальным движением.
4.10. Судья немедленно объявляет «Давление», как только робот использует большее усилие для "проталкивания" мяча в направлении ворот. После этого судья размещает мяч в центре поля, и матч продолжается без остановки. Если после того, как судья объявил «Давление», был забит гол, как прямой результат «проталкивания» мяча роботом, то гол не будет засчитан.
4.11. Участники команд не могут прикасаться к роботам без разрешения судей. В случае нарушения робот может быть дисквалифицирован.
4.12. Если мяч ударяется о борт за воротами, игра не будет остановлена, и мяч непосредственно возвращается в центральную точку поля. Если это место занято роботом, то мяч будет помещен как можно ближе, но не прямо перед роботом.
4.13. Если оба робота обороняющейся команды находятся в своей штрафной площадке, и их действия расцениваются как существенно влияющими на игру, судья объявляет «Двойная оборона» и перемещает в центр поля робота, оказывающего наименьшее влияние на игру. В случае участия вратаря в такой ситуации, то перемещается нападающий команды.
5. Рестарт
5.1. «Рестарт» объявляется в том случае, если мяч заблокирован между несколькими роботами в течение разумного периода времени и не имеет никаких шансов освободиться, или, если никакой робот не может приблизиться к мячу за разумный период времени. В качестве «разумного периода времени» принимается период времени длительностью до 15 секунд.
5.2. Роботы, участвующие в блокировке, должны быть немедленно перемещены в свою штрафную площадку. Часть робота должна находиться внутри штрафной площадки.
5.3. Роботов можно не выключать и держать за ручку.
5.4. Судья запустит мяч с места в центре длинной стены поля по направлению к центру поля.
5.5. Роботов можно отпустить, как только мяч покинет руку судьи.
5.6. Любой робот, который не может стартовать немедленно, будет объявлен «поврежденным».
5.7. Любой робот, который отпущен прежде, чем мяч был выпущен, будет удален с поля на одну минуту.
6. Поврежденные роботы
6.1. Робот будет объявляться судьей поврежденным, если он имеет серьезные поломки, движется неправильно (например, раздел «Вратарь») или не реагирует на мяч.
6.2. Участники могут убирать роботов с поля, если судья дает разрешение после запроса капитана команды. Такой робот будет расцениваться как поврежденный.
6.3. Поврежденный робот должен оставаться вне поля в течение одной минуты или до забитого гола.
6.4. Поврежденный робот должен быть отремонтирован, прежде чем он будет возвращен на поле. Если робот не восстановлен или не может быть восстановлен, то он будет удален до конца тайма.
6.5. Поврежденный робот может быть возвращен на поле только после разрешения судьи. Робот должен быть помещен в штрафную площадку своей команды, и в таком положении, которое не дает роботу явное преимущество, т.е. не в направлении мяча. Судья не разрешит вернуть робота на поле, если тот перекрывает путь мячу, катящемуся в ворота.
6.6. Если робот переворачивается по своей собственной вине или в результате столкновения с роботом своей команды, то он будет считаться поврежденным.
6.7. Если робот переворачивается в результате столкновения с роботом противника, он не будет расцениваться как поврежденный и может быть поставлен судьей, и матч должен продолжаться.
7. Разъяснение правил
7.1. Во время матча решение судьи является окончательным.
7.2. Если участники требуют разъяснения правил, то они должны сделать это немедленно, попросив «Судейского перерыва». Таймер матча будет остановлен.
7.3. Если капитан команды не удовлетворен объяснением судьи, то он может просить обратиться к главному судье состязания.
7.4. Тренеры не должны быть вовлечены в любое обсуждение правил.
7.5. Видеозаписи не принимаются к рассмотрению.
7.6. После того, как главный судья состязания и судья матча пришли к единому решению, дальнейшие обсуждения не принимаются.
7.7. Любое дальнейшее возражение приведет к вручению желтой карточки, и далее красной карточки, если капитан команды или тренер продолжит возражать.
7.8. Красная карточка приведет к тому что, этот человек обязан покинуть зону состязания до конца состязания.
7.9. Главному судье состязания может потребоваться внести изменения в правила в виду местных условий или обстоятельств проведения состязания. Участники будут уведомлены об этом при первой же возможности.
8. Характеристики робота
8.1. Конструирование и программирование роботов должны осуществляться исключительно участниками команды.
8.2. В роботах можно использовать только один ультразвуковой датчик NXT или EV3. Датчик должен быть размещен в задней части робота и обращен направо.
8.3. Роботы должны считывать ультразвуковые показания, только когда робот (и нападающий, и вратарь) обращен в сторону собственных ворот противника (рис. 1, 2); или в случае вратаря датчик должен быть кроме того, вратарю разрешается использовать ультразвуковой датчик, когда датчик направлен на ворота, которые он защищает (рис. 2). Если будет обнаружено, что робот создает помехи в ультразвуковые показания других роботов, то робот будет объявлен поврежденным. При повторении ситуации потребуется перевести ультразвуковой датчик в отключенное состояние.

Рис. 1. Правила использования ультразвуковых показаний роботом-нападающим.

Рис. 2. Правила использования ультразвуковых показаний роботом-вратарем.
Если вратарь находится в правильной позиции для использования ультразвукового датчика, но при этом находится за пределами своей штрафной зоны и направлен в сторону ворот противника, то он будет рассматриваться как робот, умышленно создающий помехи любому проезжающему мимо него роботу (со стороны ультразвукового дачтика), и будет объявлен поврежденным (рис. 3).
8.4. Роботы будут измеряться в вертикальном положении, при этом они не должны ни на что опираться и их подвижные части должны быть максимально выдвинуты.
8.5. Робот в вертикальном положении должен помещаться в вертикально расположенный цилиндр диаметром 22 см.
8.6. Высота робот должна составлять менее 22 см.
8.7. Вес роботов должен составлять не более 1 кг.
8.8. Если у робота есть часть, которая может выдвигаться в двух направлениях, то он должен быть проверен во время работы этой части. При этом робот не должен касаться измерительного цилиндра.
8.9. В конструкции роботов необходимо предусмотреть ручку, за которую судьи смогут их легко взять. На данную ручку не распространяются ограничения по высоте робота. Ручки могут быть сделаны из любых деталей, не обязательно LEGO.
8.10. Участники состязания должны оформить своего робота (обозначить метками, украсить) так, чтобы была видна принадлежность роботов к одной команде. Это не должно влиять на игровой процесс. Оформление робота также не подпадает под ограничение по высоте.
8.11. Раскраска роботов или излучаемый ими свет не должны мешать работе датчиков других роботов.
9. Сборка робота
9.1. Участники несут ответственность за то, чтобы робот соответствовал требованиям правил в течение всего периода состязания. Если после матча выяснится, что робот не соответствовал правилам, то очки, начисленные команде в матчах с участием такого робота, будут аннулированы.
9.2. Роботы должны быть спроектированы с учетом возможных неровностей поверхности высотой до 5 мм и наклона.
9.3. Команды должны проектировать и программировать своих роботов, принимая во внимание изменения в освещении, интенсивности мяча и магнитных условиях, так как они могут отличаться друг от друга в различных местах проведения, и меняться с течением временем.
10. Управление роботом
10.1. Роботы должны работать автономно.
10.2. В роботах должен быть предусмотрен ручной запуск.
10.3. Использование пульта дистанционного управления любого рода не допускается.
10.4. Роботы должны быть способны двигаться в любом направлении.
10.5. Коммуникация между роботами по каналу Bluetooth является приемлемой до тех пор, пока это не мешает работе других роботов.
10.6. Должна быть предусмотрена возможность отключения коммуникации между роботами по требованию судьи.
11. Ведение мяча
11.1. Зона захвата мяча – это любое внутреннее пространство, определяемое в результате прикладывания вертикальной поверхности к выступающим частям робота.
11.2. Мяч не может проходить в зону захвата мяча более чем на 2 см.
11.3. Робот не может «удерживать» мяч. Удерживать мяч значит полностью завладеть мячом, исключив любую свободу его движений. Примерами являются фиксация мяча в конструкции робота, укрытие мяча роботом или его блокирование любой частью робота. Если мяч перестает вращаться во время движения робота, или мяч не отскакивает при попадании в робота, то это хороший показатель, что мяч блокирован.
11.4. Не разрешается удерживать мяч под роботом, другими словами ни одна из частей робота не может нависать над мячом более чем на половину диаметра мяча.
12. Вратарь
12.1. Если команда использует вратаря, то он не может быть ограничен в движениях и перемещаться только в одном направлении на поле. Он должен быть запрограммирован на движение во всех направлениях.
12.2. Вратарь должен реагировать на мяч, двигаясь вперед, для того, чтобы перехватить мяч до того, как он попадет в ворота. При необходимости, робот-вратарь может выходить некоторой частью за пределы штрафной площадки (45 см от ворот).
12.3. Не допускается реакция на мяч в виде движения вбок, а затем вперед.
12.4. Если робот-вратарь не реагирует на сигналы мяча движением вперед, то этот робот считается «поврежденным» (Раздел 6).
13. Аутентификация работ участников команд
13.1. Участники команды должны будут объяснить принцип работы своих роботов в ходе опроса, чтобы убедиться в том, что сборку и программирование роботов они осуществили самостоятельно.
13.2. Участники команды должны будут ответить на вопросы касаемо их участия в подготовке.
13.3. Участниками команды должно быть продемонстрировано полное понимание программы.
13.4. Ожидается, что организаторы состязания проведут опрос до начала мероприятия.
13.5. Если экспертная комиссия установила, что тренер оказал существенную помощь, или работу над роботами преимущественно произвели не участники команды, то команда будет дисквалифицирована.
14. Ничья в Финальном туре
14.1. Если в матче Финального тура, проводимого по схеме плей-офф («на выбывание»), окажется равный счет, то матч не останавливается, и игра продолжается до первого гола.
14.2. Если гол не забит по истечении 3 минут дополнительного времени, то будут удалены вратари, в случае двух нападающих, команда может выбрать робота, который будет удален.
14.3. Если гол не забит по истечении еще 3 минут, то будет награждена команда с наиболее высоким рейтингом по итогам квалификационного тура.
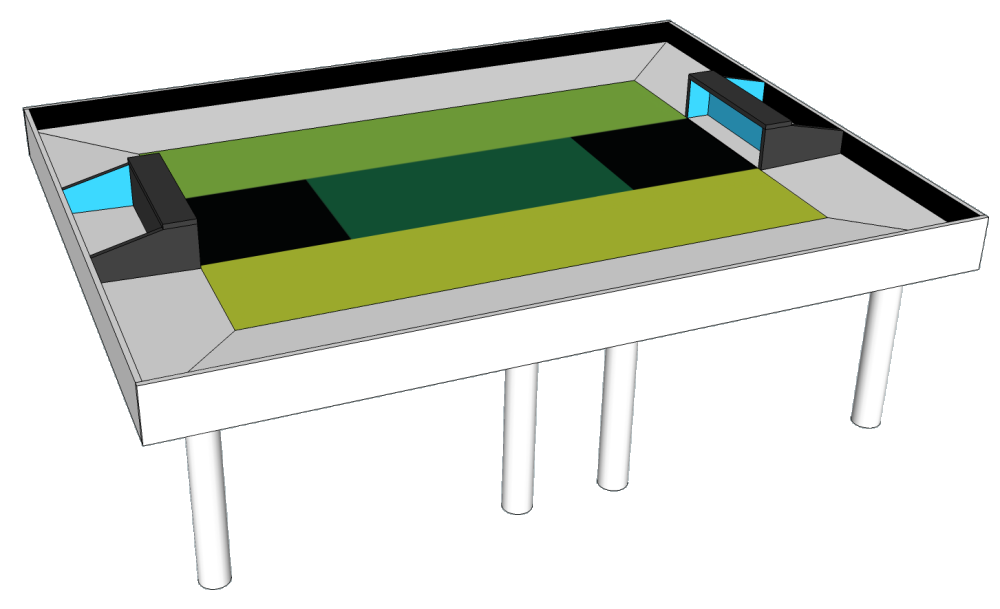
15. Поле для футбола
15.1. Игровое поле для футбола имеет размеры 1820 мм х 2430 мм.
15.2. Покрытием будет служить зеленый ковер. Рекомендуется использовать уличный или фабричный ковер 3-5 мм толщиной, темно-зеленого цвета. Размер волокон ковра должен составлять менее 10 мм. Ковер должен возвращать значение 3 или выше при использовании датчика цвета EV3 в режиме измерения интенсивности отраженного света.
15.3. На ковре будут обозначены штрафные площадки, отмеченные черными линиями толщиной 25 мм, причем внутренняя граница линии совпадает с границей внутренней части ворот. Линяя штрафной площадки начинается от штанги.
15.4. В центре поля будет обозначена область круглой формы, радиусом 25 мм, окрашенная в черный цвет.

15.5. Поле должно размещаться на деревянном или пластиковом столе или на полу. Если поле располагается на полу или на столе с металлическими опорами, то необходимо проверить магнитные условия.
15.6. В полях будут использоваться наклоны размерами 30 см х 1 см вдоль длинных бортов. Наклоны нужны для того, чтобы мяч мог скатиться с вершины наклона к центру поля.
15.7. Матовые черные стены размещены по всем краям поля, в том числе за воротами.
15.8. Стены должны быть минимум 10 см высотой над уровнем поверхности поля.
15.9. Стены и ворота должны быть изготовлены из фанеры или сосны толщиной минимум 5 мм, поскольку они должны выдерживать давление роботов и эффективно отражать ультразвуковые сигналы.
15.10. Ширина ворот составляет 45 см.
15.11. Задняя и боковые стенки внутри ворот окрашены в лазурно голубой цвет (R: 80 G: 200 B: 250). На дне ворот находится темно-зеленый ковер. Внешние стенки ворот окрашены в матовый черный цвет.
15.12. Глубина ворот составляет 7,5 см, причем задняя стенка ворот совпадает с бортом поля.
15.13. Ворота будут иметь черную перекладину на высоте 14 см над поверхностью поля.
15.14. Команды должны быть готовы к калибровке своих роботов в соответствии с условиями освещения и магнитных условий в месте проведения мероприятия. Организаторы постараются обеспечить максимально низкий уровень ИК излучения и расположить футбольные поля вдали от источников магнитных полей, таких как проводка под полом и металлические предметы. Однако иногда этого нельзя избежать.
16. Мяч WRO
16.1. В игре должен использоваться сбалансированный электронный мяч диаметром 7,4 см.
16.2. В состязании будет использоваться инфракрасный электронный мяч фирмы Hitechnic (IRB 1005) в режиме импульсного излучения - MODE D (pulsed).
17. Кодекс поведения
17.1. Участники должны соблюдать требования к поведению во время состязания.
17.2. В случае нарушения какого-либо пункта раздела «Во время состязаний запрещено» могут быть вручены желтые и красные карточки.
18. Упрощения правил для регионального этапа
18.1. Организаторы, по желанию, могут использовать на местном уровне поле Основной категории размером 1143 мм х 2362 мм или любого другого промежуточного размера.
18.2. Высота наклонов может варьироваться в зависимости от конструкции поля.
18.3. Если требуемого ковра нет в наличии, то организаторы могут использовать на местном уровне пластиковое или баннерное покрытие.
18.4. В узких полях организаторы мероприятия могут не использовать наклоны, если это позволит, на их взгляд, улучшить условия проведения игры.
18.5. На местном уровне организаторы мероприятия должны информировать участников о любых изменениях в размерах и спецификации полей до начала мероприятия.
18.6. Местные организаторы могут расположить отдельно изготовленные ворота задней стенкой перед бортом поля.
18.7. В зависимости от конструкции поля ворота могут уходить вглубь поля на 7,5-8 см с учетом толщины задней стенки ворот.
Вопросы можно оставлять на соответствующем форуме.robolymp.ru
Футбол управляемых роботов — Роболига

В этом состязании участникам необходимо спроектировать роботизированные модели для участия в футбольном турнире. Управление ручное. Возможно управление с телефонов, ноутбуков или планшетов.
Футбол управляемых роботов
- Общие положения
1.1. Поле
- Цвет полигона – зеленый.
- Цвет линии разметки – белый.
- Материал полигона – войлок или ковер.
- Ширина линии разметки – 15-20 мм.
- Стенки ворот прочно прикреплены к поверхности.
- На рис.1 приведен пример поля. Реальное поле может отличаться от рисунка.

Рис. 1. Схема поля
Длина – 3 м. ( поле- 2,8)
Ширина – 2 м. ( поле- 1,8 )
1.2. Мяч
- В качестве мяча используется стандартный мяч для большого тенниса.
- Цвет мяча – зеленый.
- Диаметр мяча – 67 мм.
- Вес мяча – 58 г.
- Требования к роботам
1.1. Основные спецификации
- В состязаниях участвуют по 3 робота от каждой команды;
- Максимальные размеры робота до начала поединка 250х250х250 мм.
- Высота робота не должна превышать 25 см.
- Робот не может превышать эти размеры в процессе игры. Робот может быть оборудован ударным механизмом, крайнее положение которого соответствует указанным размерам.
- Вес робота не ограничен.
- Каждым роботом управляет один оператор.
- Управление должно производиться извне через любой беспроводной канал связи. Допустимо использование любых устройств для беспроводного управления.
- Робот не должен закрывать мяч своим корпусом больше чем на 50%.
- На каждом роботе должен быть установлен вертикальный флагшток в виде оси для крепления цветного флага, соответствующего играющей команде.
- Провода должны быть связаны вместе и закреплены на корпусе робота, чтобы не мешать другим роботам в течение игры.
- Любой робот может исполнять роль вратаря.
- Каждый робот в команде должен быть оборудован ударным механизмом. Ударным механизмом является механизм, позволяющий роботу, находящемуся в центре поля, выбить мяч за центральный круг, оставаясь при этом неподвижным.
- Робот не должен захватывать мяч в процессе игры. Захватом считается перекрытие более 50% мяча корпусом робота.
1.2. Дополнительные спецификации
- Рекомендуется оборудовать робота внешним пластиковым или картонным цилиндрическим кожухом с отверстиями для ударного механизма.
- Номер робота должен быть нанесен на корпус робота и хорошо просматриваем.
- Судьи
2.1. Полномочия судей
- Каждый матч проходит под контролем судей, которые имеют все полномочия, направленные на соблюдения правил игры.
2.2. Общие права и обязанности
- Обеспечивают соблюдение правил игры.
- Проверяют, чтобы оборудование роботов соответствовало требованиям.
- Обеспечивают отсутствие посторонних лиц на игровом поле.
- Ходить по полю и прикасаться к роботам могут только судьи.
- Удаляют все отвалившиеся от роботов части за пределы поля.
2.3. Права и обязанности главного судьи
- По своему усмотрению останавливает ход игры в связи с обнаруженными нарушениями.
- Возобновляет игру после остановки и устранения нарушения.
- Имеет право принимать дисциплинарные меры против роботов, совершающих нарушения, делая им предупреждения или удаляя с поля.
- Имеет право советоваться с остальными судьями по поводу спорных ситуаций.
- Принимает окончательные решения в ходе проведения игры
2.4. Права и обязанности судей-ассистентов
- Контролировать активность роботов на поле во время игры.
- Уведомлять главного судью о незамеченных нарушениях или других ситуациях на поле.
- Помогать в спорных ситуациях.
2.5. Решение судьи
- Решения судьи относительно фактов, связанных с игровыми моментами, считаются окончательными.
- Судья может изменить свое решение, при условии, что он еще не возобновил игру.
2.6. Сигналы судьи
- Во время игры судья подает сигналы свистком.
- Один свисток во время игры означает, что судья приостановил игру. Возобновление игры происходит так же по одному свистку судьи.
- Двойной свисток дается по окончанию тайма/матча.
- Игроки (операторы роботов)
3.1. Права и обязанности
- Одним роботом может управлять только один игрок.
- Четко знать правила игры.
- Слушать команды судьи.
- Может обратить внимание судьи на какие-либо нарушения правил во время игры.
- Находиться во время игры вне поля за своими воротами.
- Игроку категорически запрещается выходить на поле во время игры.
- Игрок может касаться роботов, находящихся в игре только с разрешения судьи.
- Игрок может брать роботов в перерывах между таймами.
- Игра
4.1. Цель игры
- За время матча забить наибольшее количество голов команде соперника.
4.2. Регламент
- Игра ведется по олимпийской системе с двумя проигрышами.
- Матч состоит из двух таймов по 3 минуты каждый. Между таймами предусмотрен перерыв не более 1 минуты.
- В финальных матчах длительность тайма составляет 5 минут, а перерыв не более 3 минут.
- Правила соревнований предусматривают дополнительный тайм в качестве дополнительного игрового времени, а так же серию буллитов и/или игры в уменьшенном составе команд, в условиях недопустимости ничей.
- Игровые моменты
5.1. Подготовка к игре
- Бросается жребий и та команда, что выигрывает в жеребьевке, выбирает вводить мяч в игру или выбрать половину поля.
- Во второй половине матча команды меняются половинами поля и атакуют противоположные ворота. Команды могут договориться о том, чтобы не меняться половинами поля и воротами с согласия судьи.
- Команда, чей соперник вводил мяч в игру в первой половине матча, вводит мяч во втором тайме.
- Во время игры во вратарской зоне не может находиться более 1 робота от команды.
- Команда получает техническое поражение, если не смогла выставить на поле ни одного робота к назначенному времени матча/тайма.
5.2. Старт
- При старте роботы устанавливаются на своих половинах полей.
- При старте мяч устанавливается в центре поля.
- Соперники команды, выполняющей ввод мяча в игру, должны находиться за пределами центрального круга, пока мяч не введен в игру.
- Игра начинается по свистку главного судьи.
- Мяч считается введенным в игру после удара по нему ударным механизмом робота команды, которая осуществляет старт игры.
5.3. Удар от ворот
- Производится:
- при касании вратаря игроком соперника во вратарской зоне, если мяч тоже находится во вратарской зоне;
- при уходе мяча за линию ворот (и ее продолжение) от команды соперника.
- Мяч устанавливается во вратарской зоне.
- Игроки противоположной команды должны выехать за вратарскую зону на расстояние не менее 50 см.
- Во время выполнения удара от ворот робот, его выполняющий, не может пересекать никакой своей частью границу вратарской зоны.
- После выполнения удара от ворот робот, производивший удар, не может касаться мяча до тех пор, пока его не коснётся другой робот или мяч не покинет игру.
- После свистка мяч вводится в игру вратарем или игроком команды.
- Замечание: при нападении мяч может быть тут же выбит из вратарской зоны. В этом случае игра продолжается.
5.4. Угловой удар
- Угловой удар назначается, когда мяч, последний раз коснувшись игрока обороняющейся команды, полностью пересёк линию ворот по земле или по воздуху.
- Мяч устанавливается внутри углового сектора, ближайшего к месту, где мяч пересёк линию ворот.
- Соперники находятся на расстоянии не менее чем 50 см. от углового сектора до тех пор, пока мяч не войдет в игру.
- Мяч считается в игре, когда по нему нанесён удар и он находится в движении.
5.5. Свободный удар
- Свободный удар назначается по свистку судьи за захват мяча командой соперника.
- Мяч устанавливается на место, где он был захвачен.
- Далее мяч вводится в игру по свистку судьи.
5.6. Спорный мяч
- В случае клинча2 более 5 секунд, судья может принять решение о розыгрыше мяча. Тогда судья по свистку приостанавливает матч, расставляет роботов и мяч по своему усмотрению и дает команду к продолжению.
- Рекомендация к игрокам: При остановке игры в данной ситуации самостоятельно разъезжаться на расстояние не менее 50 см от места клинча.
5.7. Штрафной удар
- Производится:
- когда был захват мяча роботом обороняющейся стороны во вратарской зоне;
- после двух предупреждений;
- за превышение допустимого количества игроков защищающейся команды во вратарской зоне.
6.7.2. Мяч устанавливается на расстоянии 50 см от вратарской зоны и вводится в игру командой соперника по свистку судьи.
5.8. Аут
- Засчитывается, когда мяч покинул поле через боковую линию.
- Мяч устанавливается в месте пересечения линии и вводится в игру командой соперника по свистку судьи.
- Робот во время выполнения вбрасывания мяча не может пересекать никакой своей частью боковую линию.
- После вбрасывания мяча робот, производивший вбрасывание, не может касаться мяча до тех пор, пока его не коснётся другой робот или мяч не по- кинет игру.
- В момент вбрасывания мяча роботы команды соперников не могут находиться к мячу ближе, чем роботы команды, производящей вбрасывание.
5.9. Гол
- Гол засчитывается, когда мяч полностью пересекает линию ворот, при условии, что при этом не было совершено нарушения правил со стороны команды, которая забила гол.
- После гола мяч устанавливается на середине поля. Право на ввод мяча в игру получает команда, пропустившая гол
5.10. Замена робота
- Роботы могут быть заменены во время игры (например, в случае потерей роботом соединения с пультом управления).
- Нет ограничений на количество замен.
- Процедура замены: игрок просит судью подать (убрать с поля) робота, который будет заменен, называя его номер; после этого робот, который вы- ходит на замену, въезжает на поле в любом месте границы поля.
- Робот, удаленный игроком с поля может снова выйти на поле в рамках за- мены другого робота.
5.11. Перезапуск
- Перезапуск робота / роботов возможен в случае, если на момент начала тайма или в процессе игры робот потерял соединение с пультом управления (или у него разрядился аккумулятор, или произошла другая поломка).
- По решению судьи он снимается с поля и отдается оператору для восстановления. Игра при этом не останавливается.
5.12. Финиш
- Игра заканчивается по истечении времени, отведенного на матч.
- Игра заканчивается из-за технического поражения одной из команд.
- По решению судьи, игра может быть завершена досрочно.
- Дополнительные игры
6.1. Дополнительный тайм
- Тайм играется при условиях недопустимости ничьи, если таковая произошла.
- Тайм играется до первого гола.
6.2. Игра по буллитам
- Игра по буллитам может быть назначена судьей после дополнительного тайма, если победитель так и не выявлен.
- Каждая из команд пробивает по 3 буллита по очереди.
- От одной команды выставляется вратарь, от другой — игрок. Первой пробивает буллит команда, соперник которой вводил мяч игру в последнем тайме.
- Мяч устанавливается в белом круге, на половине, где стоит вратарь.
- По свистку игрок пытается забить гол вратарю.
- На исполнение отводиться 30 секунд.
- Игра ведется
- до ухода мяча в аут или за линию ворот;
- до касания и удержания более 2 секунд (мяч не был выбит) вратарем мяча или касания игроком вратаря;
- до гола или до окончания отведенного времени.
- Вратарь не может выходить из штрафной зоны.
- Если после серии буллитов победитель не выявлен, то, по решению судью, команды либо пробивают поочередно буллиты до первого гола, либо играют матч «1 на 1». По решению судьи, игра может быть завершена досрочно.
- Дисциплинарные наказания
7.1. Предупреждения
- Выносятся за:
- задержку возобновления игры;
- нанесение повреждений мячу или полю;
- выход на поле оператора робота;
- нападение (или удержание) вратаря во вратарской зоне, когда мяч в ней не находится;
- касание оператором во время игры робота, который находится на поле, без разрешения судьи;
- превышение численного состава роботов на поле во время игры.
7.2. Назначение штрафного удара
- При получении 2 предупреждений в ворота штрафуемой команды назначается штрафной удар.
7.3. Удаление из игры
- Робот, который наносит механические повреждения другому роботу, будет удален с поля до конца тайма.
- При получении 3 предупреждений, один из роботов штрафуемой команды по решению судьи должен немедленно покинуть поле до конца тайма.
- Если у команды соперников не осталось роботов на поле после удаления, то ей засчитывается техническое поражение.
- После удаления одного из роботов с поля все предупреждения этой команды аннулируются.
- Правила определения победителя
- Победителем в матче считается команда, забившая больше голов сопернику.
- В олимпийской системе (плей-офф) команда с наибольшим количеством очков за матч проходит вперед.
При проведении отборочных матчей очки учитываются для определения команд, которые пройдут в плей-офф. Количество команд проходящих в плей-офф кратно 4.
roboliga.ru
Роботы и футбол: в Бразилии закончился RoboCup 2014
 Вслед за Чемпионатом мира по футболу в Бразилии прошли международные соревнования по футболу среди роботов RoboCup 2014. О самом мероприятии и философии робофутбола читайте в нашей статье.
Вслед за Чемпионатом мира по футболу в Бразилии прошли международные соревнования по футболу среди роботов RoboCup 2014. О самом мероприятии и философии робофутбола читайте в нашей статье.
Что такое RoboCup?
RoboCup был основан в 1997 году (по другим сведениям в 1993) с весьма амбициозной целью — создать к 2050 году команду роботов-футболистов, которые смогут выиграть футбольный матч у победителя Чемпионат мира по футболу среди людей, соблюдая все правила FIFA.
Роботы NAO на футбольном поле
Название RoboCup — сокращение от Robot Soccer World Cup — Чемпионат по футболу среди роботов. RoboCup включает состязания по РобоФутболу в нескольких категориях в зависимости от размера и формы роботов:
- малые роботы (не более 18 см),
- средние роботы (до 50 см),
- стандартные платформы (все команды создают роботов на одной и той же платформе, например NAO),
- роботы-гуманоиды (произвольные платформы и дизайн).
Кроме того проводится целая серия не связанных с футболом соревнований — таких как танцы роботов, бытовые роботы, роботы-спасатели, промышленные роботы, компьютерный симуляции и другие.
RoboCup — популярное ежегодное робототехническое мероприятие. Турниры проводятся по всеми миру. В них принимает участие около 40 стран и 2500 команд. Участие в соревнованиях принимают и дети, и студенты, и профессиональные команды — возраст не ограничен.
Презентационный ролик RoboCup 2014 в Бразилии:
За право проведения очередных соревнований проводятся конкурсы. В 2014 году RoboCup впервые прошел в Южной Америке — в Бразилии. Примечательно, что он состоялся сразу следом за «традиционным» Чемпионатом мира по футболу, который был открыт голом парализованного человека в экзоскелете.
В следующем году RoboCup пройдет в Китае, а вчера был объявлен организатор RoboCup 2016 — это немецкий Лейпциг, который смог выиграть право проведения конкурса у французского Лиона.
Футбол роботов
Футбол роботов — одно из самых популярных направлений робототехники. Почему именно футбол, а не другой вид спорта?
Все просто. Футбол — самая популярная игра с невероятным количеством спортсменов и зрителей по всему миру. Благодаря популярности традиционного футбола робофутбол заведомо получает большое количество поклонников и вызывает интерес у широких слоев населения.
Вместе с тем, создание команды роботов-футболистов, которые смогут автономно, т.е. без участия человека, играть в футбол — сложная и интересная робототехническая задача, которая требует и уникальных алгоритмов, и конструкторских решений. Разработка таких роботов имеет самостоятельную ценность для науки и техники, и конечно это емкое направление для образовательной робототехники.
Наиболее популярны среди простых зрителей футболисты-гуманоиды, однако в РобоФутболе могут встречаться и далекие от человеческого облика роботы:
' mycrib[2] = '' var x = 0; function rotate(mycrib) { while (x Соревнования по футболу роботов проводятся в рамках очень многих мероприятий. Например, категория РобоФутбол представлена на WRO.
Результаты и победители RoboCup 2014
В заключении некоторые результаты и победители в футбольных категориях.
В категории малые роботы (RoboCup Soccer Small Size League) выиграла команда ZJUNLICT Университета Чжэцзяня, Китай.
В категории средние роботы (RoboCup Soccer Middle Size League) выиграла команда TechUnited Технического Университета Эйндховена, Нидерланды.
Видео финала Нидерланды-Китай:
В футболе на стандартной платформе (RoboCup Soccer Standard Platform League) выиграла команда rUNSWIFT Университета Нового Южного Уэльса, Австралия.

NAO-победитель из Австралии
Видео финала Австралия-Германия:
В категории гуманоидов-взрослых (RoboCup Soccer Humanoid League, AdultSize Competition) выиграла команда Team THORwIn Университета Пенсильвании, США.

Робот из команды THORwIn и один из его разработчиков
В категории гуманоидов-подростков (RoboCup Soccer Humanoid League, TeenSize Competition) выиграла команда Baset TeenSize из Ирана.

Роботы из Nimbro TeenSize (Германия), занявшей второе место среди гуманоидов-подростков
В категории гуманоидов-детей (RoboCup Soccer Humanoid League, KidSize Competition) выиграла команда CIT Brains Технического Университета Тибы, Япония.
Фото: flickr.com by RoboCup2014, wsj.com, twitter.com/NaoRobot
Читайте также
edurobots.ru
Всероссийская робототехническая олимпиада
Это ОКОНЧАТЕЛЬНАЯ версия правил всероссийского этапа Всероссийской Робототехнической Олимпиады 2015. Перевод правил международного этапа World Robot Olympiad 2015 находятся в соответствующем разделе сайта.
Правило 0. Создание и программирование роботов должно осуществляться только обучающимися.
1.1.1 Размеры игрового поля – 122 см х 183 см. По периметру поля нанесена граница – белая полоса шириной 30 см.
1.1.2 Поверхность игрового поля представляет собой виниловое покрытие (с напечатанной на нем разметкой поля), имеющее матовую поверхность, препятствующей скольжению, которую можно приобрести на
.
1.1.3 Центральная часть игрового поля должна быть ровной и горизонтальной.
(наклон позволяет мячу скатиться с верхней боковой точки к ближайшему краю темно-зеленой зоны.).
1.1.4 Игровое поле должно быть расположено на ковровой подстилке. Рекомендуется использовать ковровую подстилку толщиной 3 мм. Советы по сборке полей для соревнований или занятий доступны на сайте
.
столе или на полу. Следует проверить электромагнитные условия, если поле находится на полу или на столе, имеющем металлические ножки.
1.2. Ограждающие стенки 1.2.1 Черные матовые ограждающие стенки располагаются по всему периметру поля и за воротами. 1.2.2 Ограждающие стенки должны быть выше игрового поля как минимум на 8 см. 1.2.3 Ограждающие стенки могут быть изготовлены из любого неметаллического материала, поскольку они не влияют на игровой процесс.
1.3. Ворота 1.3.1 Ширина ворот – 45 см. 1.3.2 Задняя и боковые стенки ворот должны быть изнутри окрашены в лазурный цвет R: 80 G:220 B:250. Пол под воротами – белого цвета. Внешние стороны ворот должны быть окрашены в матовый черный цвет. 1.3.3 Глубина ворот – 7,4 см. 1.3.4 У ворот должна быть черная перекладина, расположенная на высоте 14 см над поверхностью поля. 1.3.5 Поверхность поля внутри ворот должна быть ровной и горизонтальной. 1.3.6 Боковые стенки ворот должны доходить до стенки поля, чтобы избежать закатывания мяча за ворота.
1.4. Освещение и магнитные условия 1.4.1 Команды должны быть готовы к калибровке своих роботов в соответствии с освещением и магнитными условиями в месте проведения соревнований. Организаторы постараются поддерживать минимально возможный уровень инфракрасного излучения, а также расположить игровые поля как можно дальше от излучателей магнитных полей таких как электропроводка и металлические предметы. Однако, это не всегда возможно. Командам рекомендуется разрабатывать роботов так, чтобы они могли успешно действовать в меняющихся условиях освещенности и магнитных условиях, которые могут отличаться в зависимости от мест проведения соревнований.
2. Мяч
2.1. Спецификация 2.1.1 В игре должен использоваться сбалансированный электронный мяч диаметром 7,4 см. 2.1.2 На всех турнирах будет использоваться инфракрасный электронный мяч фирмы Hitechnic (IRB 1005) в режиме импульсного излучения - MODE D (pulsed).
2.2. Поставщики мяча 2.2.1 Официальными мячами для всех турниров будут мячи Hitechnic Infrared Electronic Ball (IRB1005).
3. Роботы
3.1. Размеры 3.1.1. Роботы будут измеряться в вертикальном положении, ни на что не опираясь, при этом все его подвижные части должны быть максимально выдвинуты. 3.1.2. Робот, находящийся в вертикальном положении, должен уместиться в вертикальном цилиндре с внутренним диаметром 22 см. 3.1.3. Высота робота должна быть меньше 22 см. 3.1.4. Вес робота не должен превышать 1 кг. 3.1.5. Если у робота есть часть, которая может выступать в двух направлениях, то он должен быть проверен во время работы этой части. При этом робот не должен касаться измерительного цилиндра.
3.2. Конструкция 3.2.1. К роботам, участвующим в Футболе Роботов, применяются следующие требования:
3.2.2. Роботы должны быть собраны в течение времени, отведенного на сборку и отладку роботов, в день соревнований. Все части робота должны находиться в исходном состоянии (все детали отдельно) до начала времени сборки и отладки. Роботы могут подвергаться изменениям во время соревнований. Роботы должны быть помещены в зону карантина на ночь (между днями соревнований) и не должны покидать зону соревнований пока они не закончат участвовать в соревнованиях, если иное не оговорено организаторами всероссийского этапа Всероссийской Робототехнической Олимпиады 2015.3.2.3. В конструкции роботов необходимо предусмотреть ручку, за которую судьи смогут их легко взять. К данной ручке не относятся ограничения по высоте робота. Ручки могут быть сделаны из деталей, не принадлежащих марке LEGO. Примечание: Из кабельных стяжек получаются прочные легкие ручки. Примечание: Командам рекомендуется создавать роботов, которые могут справиться с небольшими дефектами поверхности и преодолевать неровности высотой до 5 мм.
3.3. Управление 3.3.1. Роботы должны работать автономно. 3.3.2. Запуск робота должен производиться вручную. 3.3.3. Использование каких-либо пультов дистанционного управления запрещено. 3.3.4. Роботы должны быть способны перемещаться во всех направлениях. 3.3.5. Разрешается передача данных между роботами посредством BlueTooth, но только если это не влияет на работу других роботов. Роботы должны обладать возможностью отключения передачи данных, на случай если этого потребует судья.
3.4. Маркировка/расцветка 3.4.1. Участники соревнований должны оформить своего робота (обозначить метками, украсить) так, чтобы была видна принадлежность роботов к одной команде. Это не должно влиять на игровой процесс. Оформление робота также не попадает под ограничение по высоте. 3.4.2. Цвета роботов или излучаемый ими свет не должны мешать работе сенсоров других роботов.
3.5. Состав команды 3.5.1. Все команды должны состоять не более чем из двух роботов. Любые замены или совместное пользование роботами несколькими командами во время соревнований запрещено и приведет к дисквалификации.
3.6. Зоны захвата мяча и движение мяча 3.6.1. Зоны захвата мяча – это любое внутреннее пространство, определяемое в результате прикладывания вертикальной поверхности к выступающим частям робота. 3.6.2. Мяч не может проходить в зону захвата мяча более чем на 2 см. 3.6.3. Робот не может «удерживать» мяч. Примечание: Удерживать мяч значит полностью завладеть мячом, исключив любую свободу его движений. Примерами являются фиксация мяча в конструкции робота, укрытие мяча элементами робота с целью препятствовать допуск к мячу других роботов, окружение мяча или его блокирование любой частью робота. Если мяч перестает вращаться во время движения робота, или мяч не отскакивает при попадании в робота, то это хороший показатель, что мяч блокирован. 3.6.4. Не разрешается удерживать мяч под роботом, другими словами ни одна из частей робота не может выступать над поверхностью мяча более чем на половину диаметра мяча.
3.7. Вратари 3.7.1. Если команда использует вратаря, то он не может быть ограничен в движениях и перемещаться только в одном направлении на поле. Он должен быть запрограммирован на движение во всех направлениях. 3.7.2. Вратарь должен реагировать на мяч, двигаясь вперед, для того, чтобы перехватить мяч до того, как он попадет в ворота. При необходимости, некоторые части робота-вратаря могут выходить за пределы штрафной площадки (45 см от ворот). Примечание: Не допускается реакция на мяч в виде движения в сторону, а затем вперед. 3.7.3. Если робот-вратарь не реагирует на сигналы мяча движением вперед, то этот робот считается «поврежденным» (Пункт 4.7).
4. Игровой процесс
4.1. Настройка перед игрой 4.1.1. Организаторы предоставят доступ к месту проведения соревнований до их начала для предварительной настройки и тестирования роботов в соответствии с расписанием, которое будет опубликовано в начале мероприятия. 4.1.2. Организаторы приложат максимум усилий, чтобы предоставить участникам как минимум 10 минут для настройки роботов перед каждой игрой. 4.1.3. В это же время команды могут обращаться по всем вопросам, касающимся соответствия других роботов правилам соревнований.
4.2. Продолжительность игры 4.2.1. Игра состоит из двух таймов по 10 минут. В некоторых соревнованиях таймы могут длиться по 5 минут с согласия организационного комитета соревнований. 4.2.2. Между таймами предусмотрен перерыв в 5 минут. 4.2.3. Время, отведенное на игру (два тайма по 10 минут), будет идти без остановок (за исключением судейских тайм-аутов, описанных в пункте 4.6.10). 4.2.4. По решению судьи команды могут быть наказаны голом за каждую минуту опоздания. 4.2.5. Если в течение 5 минут с начала игры команда не появляется, то ей засчитывается поражение в игре, а команда-победитель выигрывает со счетом 5-0. 4.2.6. Игра заканчивается, если разрыв в счете достигает 10 мячей. Проигравшая команда может решить доиграть матч, но счет останется неизменным.
4.3. Начало игры 4.3.1. В начале первого тайма, судья подкидывает монетку, а первая в списке команда выбирает орел или решка, пока монетка находится в воздухе. 4.3.2. Победитель жребия может выбрать, когда разыгрывать мяч первым: вначале первого или вначале второго тайма. 4.3.3. Команда, не разыгрывавшая мяч в первом тайме, будет разыгрывать мяч во втором тайме.
4.4. Розыгрыш мяча 4.4.1. Каждый тайм начинается с розыгрыша мяча. 4.4.2. Все роботы должны находиться на своей половине поля. 4.4.3. Роботы не должны быть запущены. 4.4.4. Судья помещает мяч в центр игрового поля. 4.4.5. Команда, разыгрывающая мяч, первой помещает своих роботов на поле. Изменение положения роботов после их первоначального размещения запрещено. 4.4.6. Роботы команды, не разыгрывающей мяч, должны находиться какой-либо частью в пределах штрафной зоны. 4.4.7. По сигналу судьи, все роботы должны быть запущены членами команд. 4.4.8. Робот, разыгрывающий мяч, должен произвести отчетливый удар по мячу, чтобы он откатился на расстояние минимум 5 см от робота, либо робот должен стартовать, находясь на расстоянии 5 см от мяча. Неправильный розыгрыш мяча приведет к переходу права розыгрыша мяча к другой команде. 4.4.9. Роботы, запущенные до сигнала судьи, будут удалены с поля на минуту.
4.5. Счет 4.5.1. Гол засчитывается, когда мяч полностью пересекает линию ворот, что соответствует касанию мяча задней стенки ворот. Если гол засчитан, судья подает сигнал свистком. 4.5.2. Штрафной гол засчитывается, если мяч, катившийся в ворота, попадает в робота защищающейся команды, часть которого находилась за линией ворот или в воротах. Примечание: Рекомендуется конструировать роботов таким образом, чтобы штанга не позволяла им пересекать линию ворот. 4.5.3. После забитого гола производится розыгрыш мяча. Он осуществляется командой, пропустившей гол. 4.5.4. Гол в собственные ворота будет засчитываться в пользу соперника.
4.6. Перезапуск игры 4.6.1. «Перезапуск игры» будет объявлен, если мяч застревает между несколькими роботами на достаточно длительный промежуток времени и не имеет возможности быть освобожденным, либо если ни один из роботов не может обнаружить мяч в течение длительного промежутка времени. 4.6.2. Судья подает сигнал «Перезапуск игры» сразу же, как только робот начинает использовать бóльшую мощность, чтобы протолкнуть мяч через блок соперников. Если судья подает сигнал «Перезапуск игры», а в результате силового проталкивания мяча забивается гол, то гол отменяется. 4.6.3. Любые застрявшие роботы будут немедленно возвращены в штрафные площадки своей команды. Некоторая часть робота должна находиться в зоне штрафной площадки. 4.6.4. Разрешено оставлять роботов запущенными. 4.6.5. Судья поместит мяч на вершине наклона в центре длинной стороны поля, откуда мяч скатится по направлению к центру поля. 4.6.6. Роботы могут начать движение только когда судья отпускает мяч на поле и раздается свисток. 4.6.7. Роботы, которые не могут сразу же приступить к игре, будут объявлены «поврежденными». 4.6.8. Роботы, которые начали движение до свистка, будут удалены с поля на 1 минуту и объявлены «поврежденными» (см. пункт 4.7). 4.6.9. Если робот был поврежден в результате разъединения роботов, судья останавливает игру и отсчет игрового времени на период длительностью до 2 минут, пока идет починка робота (см. пункт 4.9.4 «Судейские тайм-ауты»). 4.6.10. Судья может объявить «Судейский тайм-аут» для ремонта игрового поля, а также для таких ситуаций как в пунктах 4.6.9. или 4.9.3 или если судью вызывают для разъяснения правил соревнований. Судья может принять решение об остановке отсчета игрового времени, если прерывание игрового процесса длится продолжительное время.
4.7. Поврежденные роботы 4.7.1. Если робот не двигается и/или не реагирует на мяч, то судья объявляет его поврежденным. 4.7.2. Если одиночный робот находится в воротах дольше 20 секунд или застрял напротив стенок ворот и не подает признаков возвращения в игровую зону, то судья объявляет его поврежденным. Примечание: Небольшое перемещение в обратном направлении, заданное в программе, обычно помогает высвободить робота. 4.7.3. Судья или игроки (с разрешения судьи) могут убрать поврежденного(-ых) робота(-ов) с поля. 4.7.4. Поврежденный робот должен находиться за пределами поля минимум 1 минуту или до следующего гола. 4.7.5. Поврежденного робота можно починить и вернуть на поле с разрешения судьи в нейтральную зону, ближайшую к своим воротам и не дающую преимуществ возвращенному роботу, например, выставление его напротив мяча. Вратари могут быть возвращены в зону перед воротами. 4.7.6. Игра продолжается во время удаления, починки или возвращения робота. Обратите внимание, что судья может принять решение об остановке игры, если робот был поврежден в результате столкновения с роботом соперников. 4.7.7. Если робот переворачивается самопроизвольно, он будет объявлен поврежденным и удален с поля. Если робот опрокидывается после столкновения с другим роботом, он может быть поправлен судьей и продолжить играть.
4.8. Групповая оборона 4.8.1. Групповая оборона означает, что более чем один робот защищающейся стороны входит в штрафную площадку, занимает защитную позицию и значительно влияет на игру. 4.8.2. Робот, входящий в групповую оборону и оказывающий наименьшее влияние на ход игры, перемещается в центр поля. Если один из этих роботов – вратарь, другой робот будет перемещен в центр поля.
4.9. Нарушения 4.9.1. Если робот использует приспособление или действие, продолжительно атакующее или затрудняющее действия робота, не владеющего мячом, судья объявляет о нарушении правил. В этом случае капитан команды должен убрать робота с игрового поля минимум на 1 минуту и исправить проблему; игра будет продолжена (согласно пункту 4.7 "Поврежденные роботы"). 4.9.2. Если робот продолжает нарушать правила, он будет окончательно удален из игры, также на робота будет помещен желтая предупреждающая наклейка, и судья зафиксирует нарушение в протоколе матча. 4.9.3. Если робот был поврежден в результате нарушения правил, судья останавливает игру и отсчет игрового времени вплоть до 2 минут пока идет починка робота (см. пункт 4.6.10 «Судейские тайм-ауты»). 4.9.4. Если робот удаляется из двух игр за нарушение правил, то он будет исключен из участия в соревнованиях.
4.10. Участие людей 4.10.1. Перемещение роботов людьми во время игры недопустимо. 4.10.2. Люди могут передвигать роботов только по разрешению судьи. 4.10.3. До начала игры команды должны определить капитана команды, которому будет разрешено размещать, убирать и переставлять роботов во время игр в соответствии с правилами и указаниями судьи. 4.10.4. Другие члены команды могут запустить одного робота, но после этого им не разрешается находиться в пределах игрового поля. Они должны находиться на расстоянии минимум одного метра от поля, пока мяч находится в игре, если нет других указаний со стороны судьи.
5. Разрешение конфликтных ситуаций
5.1. Судья 5.1.1. Во время игры окончательное решение принимает судья. Любое оспаривание решения судьи приведет к получению желтой предупредительной карточки. Если спор продолжается, судья показывает красную карточку, а команде засчитывается поражение в игре. 5.1.2. Если капитаны команд согласны с результатом игры, то они должны подписать финальный протокол по окончании игры. 5.1.3. Любые возражения по окончании игры уместны, только если предполагается, что итоговый результат неверный или если результат игры вызывает сомнения. После того, как финальный протокол подписан, никакие протесты не принимаются.
5.2. Разъяснение правил 5.2.1. Разъяснить правила могут члены судейской коллегии. 5.2.2. Если необходимо разъяснение правил, то судья должен немедленно остановить игру, объявить судейский тайм-аут (пункт 4.6.10), остановить игровое время и уточнить правила перед продолжением игры.
5.3. Особые обстоятельства 5.3.1. Разрешены изменения в правилах при особых обстоятельствах (таких как, непредвиденные ситуации и/или технические возможности роботов) могут приниматься во время соревнований с согласия большинства участников.
6. Инспектирование
6.1. Техническая инспекция 6.1.1. Все роботы проверяются судейской коллегией в начале каждого дня соревнований, чтобы удостовериться в соответствии роботов требованиям раздела 3. 6.1.2. В обязанности команды входит предоставление роботов на перепроверку, если их роботы были изменены во время соревнований. К изменениям также относятся повреждения или преобразования роботов во время игрового процесса. Любой команде, уличенной в использовании во время игры робота, который не соответствует правилам соревнований, будет засчитано поражение. 6.1.3. Любое нарушение, найденное во время инспектирования, запрещает роботу участие в соревнованиях до тех пор, пока нарушение не будет исправлено. 6.1.4. Изменения должны быть сделаны в отведенное время, и команды не должны задерживать игровой процесс.
6.2. Конструирование робота 6.2.0. Конструирование и программирование роботов должны быть выполнены только участниками. 6.2.1. С участниками проводят собеседование, где они объясняют работу их роботов, с целью убедиться в том, что они сами конструировали и программировали роботов. 6.2.2. Участникам будут заданы вопросы о подготовительных работах, также их попросят принять участие в опросе и видеозаписи интервью, которые необходимы для исследований. 6.2.3. Должно быть продемонстрировано полное понимание работы программы. 6.2.4. Предполагается, что организаторы соревнований проведут проверочные собеседования до финальных этапов. 6.2.5. Если обнаружено чрезмерное влияние тренера или очевидно, что работа над роботом в большей степени осуществлялась не участниками, то команда исключается из соревнований.
7. Правила поведения
7.1. Честная игра 7.1.1. Роботы, преднамеренно препятствующие работе других роботов и являющиеся причиной неоднократных повреждений во время игрового процесса, будут дисквалифицированы (см. пункт 4.11 «Нарушение Правил»). 7.1.2. Роботы, нанесшие повреждения полю или мячу во время игрового процесса, будут исключены из соревнований (см. пункт 3.8). 7.1.3. Людей, преднамеренно препятствующих работе любых роботов или наносящих ущерб игровому полю или мячу, могут попросить покинуть здание, где проводятся соревнования. 7.1.4. Считается, что цель всех команд – честная и чистая игра в Футбол Роботов.
7.2. Поведение участников 7.2.1. Поведение участников должно соответствовать типу соревнований. 7.2.2. Участники не должны входить на площадки подготовки других лиг или команд, кроме тех случаев, когда было сделано приглашение. 7.2.3. Участников, нарушающих правила поведения, могут попросить покинуть здание, где проводятся соревнования; они также рискуют быть дисквалифицированными. 7.2.4. Эти меры будут применены с согласия судей, официальных лиц, организаторов и представителей местной власти.
7.3. Наставники 7.3.1. Наставники (учителя, родители, сопровождающие и другие взрослые) не допускаются в зону соревнований. 7.3.2. Наставники не должны помогать в ремонте или программировании роботов. Роботы и компьютеры также не должны покидать зону, отведенную для команды, в дни соревнований. 7.3.3. Вмешательство наставников в работу робота по решению судьи может привести к получению желтой предупредительной карточке. Если это повторится, наставнику будет показана красная карточка, и его попросят покинуть место проведения соревнований.
7.4. Публикации 7.4.1. Частью международных соревнований WRO является понимание того, что любыми технологическими или учебными находками следует делиться с другими участниками по окончании соревнований. 7.4.2. Любые разработки могут быть опубликованы на сайте WRO по окончании соревнований. 7.4.3. Это и есть образовательная цель WRO.
7.5. Дух мероприятия 7.5.1. Предполагается, что все участники соревнований, как дети, так и их наставники, уважают цели WRO. 7.5.2. Судьи и официальные лица действуют в соответствии с духом мероприятия. 7.5.3. Важно не то, выиграете вы или проиграете, а то, сколько нового вы для себя узнаете.
robolymp.ru










